1 Introduction
This article refers to the address: http://
The energy and environmental crisis brought about by the rapid development of modern transportation has become a worldwide problem. Developing electric vehicles and adopting clean energy is considered to be one of the best solutions. To this end, countries have invested a lot of manpower and resources in the research of electric vehicles, and achieved gratifying results.
Electric vehicles not only include the operating speed and mileage of traditional vehicles, but also include electrical parameters such as energy consumption, power supply voltage, current and motor speed of electric vehicles. The parameters are as many as 100. Mastering these parameters is of great significance for analyzing the overall operational performance of electric vehicles. These types of parameters are different and their positions are scattered. It is very difficult to concentrate on measurement. Therefore, it is necessary to disperse the measurement, and then construct the test network by monitoring the centralized display and recording of the nodes. Controller area network (CAN) can effectively support distributed and real-time control of serial communication. Compared with other field buses, it has many advantages such as simple and reliable, high speed, no master-slave and convenient connection. A bus form that is maturely applied in automotive on-board measurement and control networks. Therefore, we choose CAN bus to construct the electric vehicle vehicle parameter test network.
2, the overall structure of the CAN bus network
2.1 Monitoring the overall structure of the network
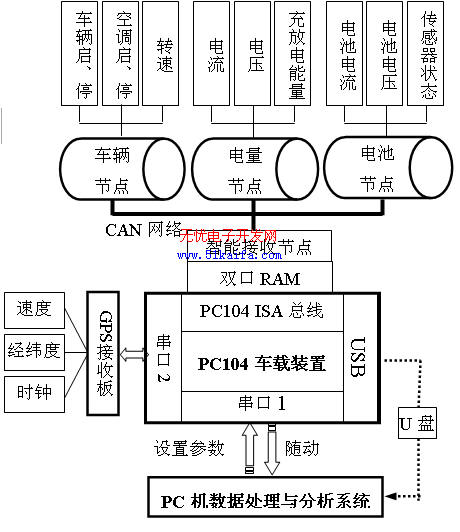
Figure 1 System overall structure block diagram
The electric vehicle operating parameter monitoring network consists of 9 CAN nodes, including a PC104 monitoring node responsible for network scheduling and data processing and 8 single-chip data acquisition nodes. The eight data acquisition nodes include one vehicle parameter acquisition node, one power battery parameter acquisition node, one auxiliary battery parameter acquisition node, one motor parameter acquisition node and four battery parameter acquisition nodes. Since the parameters collected by the power battery node, the auxiliary battery node and the motor node are voltage, current and charge and discharge energy, the three nodes can be designed as a type of node, collectively referred to as a power parameter collection node. The power battery is made up of 40 12V lead-acid batteries in series. The performance of the series battery depends on the performance of each battery. The 40 battery parameters are measured in 4 battery nodes. Each node is responsible for testing the parameters of 10 batteries. Therefore, the four battery parameter acquisition nodes are another type of data acquisition node. In addition, there is a vehicle parameter acquisition node that mainly collects various states of the vehicle, including vehicle start and stop, air conditioner switching status, engine speed (for hybrid vehicles), and motor speed. Therefore, this system includes three types of data acquisition nodes, namely, power nodes, battery nodes, and vehicle nodes. The structure of the entire system is shown in Figure 1.
In the whole system, there are 3 types of 8 data acquisition nodes, and 146 parameters are collected. The collected data is sent to the monitoring node via the CAN bus, and the monitoring node also receives the data on the bus through the microprocessor. At the same time, the node communicates with the ISA bus of a PC104 computer through the dual port RAM, and the PC 104 acquires the data received by the monitoring node from the bus through the dual port RAM, and displays and records the data. At the same time, the PC104 directly receives the vehicle speed, latitude and longitude and clock information of the GPS data receiving board through a serial port, and records and displays it as synchronization information to link the real-time performance of the vehicle with the speed and operating conditions. The information is recorded every 0.5 seconds, using a data compression algorithm for change records, and stored in the *.dat file format.
2.2 Information transmitted in the network
The CAN bus transmits data through information frames and can be divided into data frames, remote frames, error frames, and overload frames. Information is transmitted in units of messages. Different messages are distinguished by an identifier (ID). The smaller the identifier, the higher the priority of the message.
The message identifier of the monitoring node sending information is 00H, which is used to send query information to the data collection node. After receiving the query information of the monitoring node, the collecting node sends its own packet data to the bus, and the monitoring node confirms this after receiving the message. The node is working fine. In this way, the monitoring node can query the data collection nodes connected to the network at any time. Since the data length of the message is up to 8 bytes, it is necessary to allocate more message identifiers for the power nodes and battery nodes with more measured parameters. Each power node is assigned 2 identifiers, and each battery is assigned 1 identifier. Since the message identifier associated with the parameter is fixed, it can be determined which parameter is received based on the received identifier. The corresponding relationship between the message identifier (ID) and parameters transmitted in the vehicle's vehicle parameter monitoring network is shown in Table 1:
Table 1 Table of correspondence between message identifiers and parameters 
3. Design of data acquisition node
As an operational parameter monitoring network, data collection is the basis of system operation. The system has 3 types of 8 data acquisition nodes, namely vehicle parameter acquisition node, 3 power parameter acquisition nodes and 4 battery parameter acquisition nodes. The design of the three types of nodes will be introduced separately below.
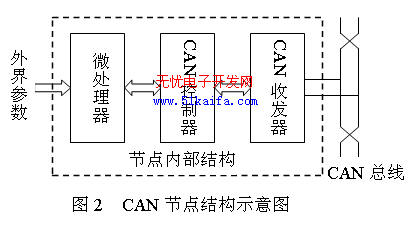
All data acquisition nodes in the system use the structure shown in Figure 2, including a microprocessor, a CAN controller, and a CAN transceiver. The microprocessor adopts 80C196KB of INTEL company, which is mainly responsible for collecting various parameters of the outside world, and managing and scheduling the work of the nodes. After collecting a reasonable set of data, the data is sent to the bus by operating the CAN controller. The CAN controller selects SJA1000, which integrates the bus protocol of CAN2.0A and CAN2.0B, and is responsible for the transmission and reception of data. The CAN transceiver 82C250 is an interface between the CAN controller and the physical bus. The internal drive circuit has a current limiting circuit that provides differential transmission and reception functions to the bus. At the same time, optical isolation is used to exchange data with the bus to help suppress automobiles. Transient interference in harsh electrical environments.
3.1 Design of vehicle parameter acquisition node
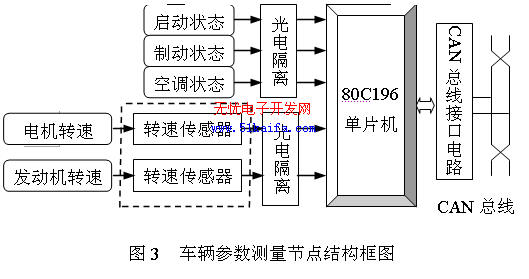
The parameters collected by the vehicle node include the state of starting and stopping of the vehicle, the switching state of the air conditioner, and the rotational speed information of the motor and the engine. From the characteristics of the collected parameters, the switching quantity and the frequency quantity are divided. For the acquisition of the switch quantity, no additional sensor is needed. Only the voltage signal can be directly input into the input port of the microprocessor through the photoelectric coupling. For the speed of the frequency, we use the Hall sensor to measure. The magnetic steel sheet is attached to the output shaft. When the magnetic steel sheet passes through the Hall element, the Hall sensor outputs a pulse, and the pulse is input to the high-speed input port of the 80C196 through photoelectric isolation. Since the high-speed input port can automatically record the timing of the pulse jump. The pulse can be accurately measured, and both high and low frequencies are applicable. The structural block diagram of the vehicle acquisition node is shown in Figure 3.
3.2 Design of the power node
For the voltage and current isoelectric parameters, the usual A/D conversion is easy to measure; but for the electric energy parameter, since it is the time integral value of the voltage and current, it is very difficult to measure by the ordinary method. Therefore, for the power measurement, the integrated power measurement chip CS5460A is used, which can measure the voltage, current and power and energy of both at the same time. The CS5460A is a single-phase bidirectional power/energy metering integrated circuit chip with a serial SPI interface. It is mainly used in single-phase electronic energy meters and three-phase electronic energy meters. After the chip completes a calibration, the calibration coefficient is stored in the EEPROM of the system. Each time the power-on CPU reads the calibration coefficient from the EEPROM and writes it into the measurement chip, and then writes the command through the SPI interface, the corresponding current voltage can be performed. And measurement of electrical energy. Through the SPI interface, the microprocessor reads the measurement result in the chip, updates the power information in the EEPROM, and sends it to the CAN bus through the message.
In order to ensure the reliable operation of the measuring circuit, the measuring circuit is designed to isolate the SPI interface of the CS5460A from the I/O port of the microprocessor through an opto-isolated device to prevent mutual interference. Since the data line (SDI, SDO) and clock line (SCLK) signals of the chip SPI interface change rapidly, the high-speed optocoupler 6N137 is used for isolation, and the coupling rate can reach 10Mbps. The chip select (CS) and reset (RESET) of the chip. And the interrupt (INT) output signal is a level signal, and the conversion rate is very low, which can be realized by the ordinary optocoupler TLP521-1.
3.3 Battery Parameter Acquisition Node Design
The electric vehicle power battery is made up of 40 12V lead-acid batteries connected in series. The performance of each battery will affect the performance of the entire battery pack. It is therefore necessary to measure the parameters of each battery. Includes the voltage, current, and status of the sensor for each cell. Since there are 40 batteries in total, the measurement task is too large with one node. Therefore, 4 nodes are designed to measure 40 batteries. Each node is responsible for measuring 10 battery parameters. The battery parameters are only voltage and current. The A/D conversion is obtained, so the design of the battery node is not described in detail.
4. Design of monitoring node based on PC104
Since the 146 parameters of the entire network test are to be displayed and recorded, the microprocessor-based MCU system is obviously not capable of such a heavy task. In addition, the use of single-chip development will inevitably bring a huge amount of work. In order to provide users with a friendly human-computer interaction interface and reduce the development workload, the monitoring node selects a compact PC, hardware and software functions and PC-like embedded PC104 modules for development.
The PC104 module uses an embedded CPU and uses a 256MB Pocket Flash disk as the system hard disk to store the operating system, applications and data collection. The 10.4-inch LCD screen is used as the interface for human-machine switching.
The flexible interface of the PC and peripherals determines the interface mode of the CAN controller and the PC. The commonly used methods are: RS-232 serial port, parallel print port, USB interface, ISA bus interface. In this system, the PC 104 obtains the data of the intelligent receiving node through the dual port RAM communication. The so-called intelligent receiving node means that the node is equipped with a microprocessor, which performs data exchange through the dual port RAM and the PC 104, and sends the data received from the bus to the PC 104 for display and recording, and the data to be sent by the PC 104. Send to the CAN bus. By adding a microprocessor, the burden on the host PC 104 is greatly reduced, and the real-time performance of the system is improved.
Figure 4 Motor current change diagram during the test
4.1 Dual-port RAM communication based on letterbox format
The mailbox structure is a logical structure that realizes sharing of the internal storage area of ​​the dual port RAM. The letter box shared storage area has two meanings: firstly, each microprocessor dedicated storage area is divided into a shared storage area, and only a small shared area is established for communication use; secondly, the shared area is subdivided, imitating the postal mailbox The format establishes a formatted logical structure.
The intelligent node's microprocessor and the PC104's ISA bus exchange data through the dual-port RAM IDT7132. Two common storage areas are opened in the dual-port RAM as two common mailboxes for communication, one for the microprocessor to the PC104. The data is transferred and the other is used by the PC 104 to transfer data to the microprocessor. In the following, a public mailbox based on the communication of the microprocessor to the PC 104 is taken as an example to introduce a communication method based on the mailbox format.
The common mailbox of the intelligent node transmitting data to the PC 104 has a length of 16 bytes, wherein the first byte is a readable and writable mark. When any party needs to operate the read and write data, the byte is checked first. If it is 0 AAH, the The operation is performed; if it is 55H, it can be operated; the second byte is the number of reading and writing, indicating the number of times the intelligent node writes new data before the PC 104 reads the data; the third byte is the ID number of the data of the group. To distinguish between different data; the fourth byte begins as a real data area, the length of the data area will vary according to the previous ID; the data area is followed by a byte of the exclusive XOR check value (from read and write) The XOR result of the start of the number can be used to verify the correctness of the transmitted data.
4.2 VC-based display recording software design
The vehicle PC104 node completes the real-time multi-tasking visual programming based on the Windows98 operating system, and realizes the data receiving, processing and display of 146 parameters. A large number of data is recorded using a "non-fixed length" data compression algorithm. Due to the high-level language Visual C6.0 programming, the design work has brought great convenience. The interface adopts the combination of traditional instrument display and animation display to build a friendly human-machine interface.
5, ground data analysis and processing
The ground data analysis and processing software uses VisualBasic6.0 as a development tool, and the interface is well illustrated, and the operation is simple and intuitive. The database uses SQL database to store and manipulate experimental data. The main function is to decompress the experimental data dumped from PC104 and store it as a database, and draw a curve of various parameters over time. Figure 4 is a graph of the motor current recorded during a certain run.
The functions of the analysis software mainly include: (1) dumping the experimental data and decompressing the data to form an experimental database; (2) playing back the experiment and reproducing the change process of each parameter during the experiment; (3) arbitrarily performing local zooming, Can carefully observe the parameter values ​​at a certain moment; (4) can query the database and simple statistics, and can print the report of the query and statistical results; (5) through the analysis and processing software, you can see the trend of each parameter, Provide a reference for analyzing the performance of electric vehicles.
6, the conclusion
After the completion of the development, the electric vehicle operating parameter recording device was loaded in the Shantou National Electric Vehicle Operation Test Base. After many software and hardware adjustments, the system was stable, the parameters were measured accurately, the real-time performance was good, and the records were correct. The work is normal, the data processing and analysis are correct, and the expected results have been achieved. It has passed the acceptance of the project team.
What`s your impression for Intel I3 Laptop? You can take i3 Laptop Deals as the entry level of Gaming Laptop . There are different parameters standards,like 14 Inch Laptop I3 11th Generation, 14inch 256GB Intel I5 11th Generation Laptop, 14.1 inch Intel i7 11th Generation Laptop, 15.6 inch I3 10th Generation Laptop,15 inch Intel I5 10th Generation Laptop, 15inch Intel i7 11th Generation Laptop, etc. That`s some of Top 10 Gaming Laptops. To operating OS, more than 80% clients choose windows 10, home or pro option; nowadays windows 11 is new arrival, you can choose as your demand. Rich slots meet your different potential application scenarios, home, office, public places, academic situations, etc.
Dual storage channels, support HDD and SSD. Your customers can update in future according potential demands.
Of course, other type, like yoga notebook, 2 In 1 Laptop , Android Tablet, Custom All In One PC , 14 inch Student Laptop, i7 16gb ram 4gb graphics laptop, etc. available here also. Just call us and get right details quickly.
Intel I3 Laptop,Laptop I3 11th Generation,i3 10th Generation Laptop,i3 Laptop Deals,Laptop Intel Core I3 Gen 11
Henan Shuyi Electronics Co., Ltd. , https://www.shuyicustomlaptop.com