
DeX-Platform is an application development platform for industrial robot control system introduced by Valkyrie Smart Technology, providing users with a complete set of development solutions from hardware to software.
Based on this platform, developers can efficiently complete intelligent application programs such as industrial robots standard application process packages, quick docking vision systems, meet the requirements of non-standard applications for various types of robots, and even independently develop a complete set of upper-level programming teaching systems, or for scientific research. Maker Education develops an independent upper software system that greatly promotes the development and improvement of solutions related to industrial robots.
Why is such a system developed?"I have a great idea that helps the chef manage the recipes on the computer!"
"Great, let's start developing this computer!"
The above dialogue is obviously impossible to happen in today's era. A software application developer, he does not need to develop a computer that can run that software before he develops a software.
However, this absurdity is currently taking place in the field of industrial robots.
In the past decades, the application of industrial robots has been relatively narrow, and the core technologies have been dominated by a few companies. Therefore, the traditional industrial robots represented by the four major international families have chosen to develop various technological packages and enhance the added value of the system. Do not want to provide too many development interfaces.
Due to the limited range of traditional industrial applications, a company can develop more comprehensive technology packages such as welding, painting, and palletizing, and provide users with a choice to purchase. This model has also become the standard model for commercial robot control systems for industrial robots.
With the continuous expansion of market demand, and the development of core components, artificial intelligence algorithms and various sensor technologies, the application field of industrial robots is rapidly expanding, and is even expanding from the pure industrial field to the civil service field.
In recent years, industrial robots have been used in more and more emerging service scenarios such as surgical medicine, movie shooting, amusement facilities, and unmanned restaurants.

Medical surgery

Filming

Recreation facilities

FOOD
When the robot application field expands, various new demands emerge, especially when it expands into the field of civil service, the demand of the industry for the functional diversity of the control system software has far exceeded. At this point, the traditional industrial robot companies can no longer meet all market applications, especially all kinds of emerging needs.
Due to the influence of the traditional foreign robot manufacturers' technological routes, most domestic manufacturers with relevant R&D capabilities have also chosen a closed system model. Therefore, the degree of openness of existing industrial robot product systems is often difficult to meet the needs of developers, and the thresholds and conditions for the development of factory settings are also high, and the prices are not advantageous.
Based on this reality, many new developers who join the industry will choose to build their own robot systems from scratch, and finally launch a new set of robot products. In this mode, developing a robotic product requires 80% of the effort and cost to be spent on the hardware body and building the test underlying system.
This creates the absurd fact at the beginning of this article: "Developing an application requires first developing a computer that can run this application." With such a high threshold for development, many people are deterred from the industrial robot industry, and the development potential of the industry itself cannot be released.
It is precisely because of such an inefficient model that although the industrial robot industry is developing rapidly, it still has not achieved a full-scale outbreak in terms of shipments and market size.

According to the data of the “China Robot Industry Development Report (2017)â€, the sales volume of domestic industrial robots exceeded 110,000 in 2017, and the market size reached US$4.22 billion. However, this data includes the share of foreign products.
Therefore, even if the share of foreign products is only half (actually more than half), the market size of domestic industrial robots is less than 2 billion U.S. dollars, and profits are even smaller. In contrast, the "king of glory" revenue in the first quarter was about 6 billion yuan (estimate); millet mobile phone shipments in January 2017 exceeded 10 million units in a single month.
In other words, Tencent's two-month revenue from a game exceeds the annual market size of domestic industrial robots; this scale is less than one percent of a consumer electronics company.
It is indeed unfair to compare these highly mature industries and the childhood industry in China's industrial robotics industry. Any industry needs to gradually develop a mature process; however, the status of industrial robots does indeed reflect the development model of the entire industry. Serious Problem.
Looking back at the current smart phone industry, under a good mode of industry participation and development, it will mobilize numerous application algorithm developers to contribute wisdom to it. Take Apple as an example. The Apple store already has over 1 million applications. This workload may not be completed by 100 Apple companies.
The iOS ecosystem is built and completed by numerous developers. Iphone is a hardware body, developers only need to buy an ontology, can be directly on the application development - do not need to build a mobile phone.
Developers publish their own works on the iOS platform, users download according to their needs, developers benefit from it. This model has inspired countless software industry practitioners to contribute to Apple.

Three application store application growth histogram

The number of application developers in the three platforms increased histogram
Only by mobilizing more people to join and contribute wisdom can an industry develop explosively, just as we are in the smartphone era. The industrial robot industry is now in need of a benign development model to promote the outbreak of the industry.
DeX-Platform IntroductionAs the mechanical and hardware systems of industrial robots tend to mature and stabilize, software control systems are becoming the decisive factor in determining the application areas and functions of industrial robots: the control system is downwardly connected to industrial robot bodies, servo systems, and various types of advanced sensors, and is connected to various types. Advanced artificial intelligence algorithm; This central position also makes the development of control system software more important for the overall development of the industrial robot industry.

Although open source robotic platforms such as ROS are powerful and powerful, they have become the choice of many developers and can help developers quickly prototype and demonstrate their capabilities.
However, because of its open source nature, the lack of commercial companies to provide stable, reliable technical support and maintenance, resulting in ROS in the development of commercial systems, there are hidden dangers, but also limited its development. In the future, the robot application software industry will have a large number of development companies like the computer software industry, and provide stable and reliable services for users in their respective segments.
Nowadays, more and more control system vendors have opened up the secondary development interface, but most of them usually only support their own robots, or require independent opening of conditions without generalized support.
UR robots are favored by many upper application developers depending on their cooperation properties and more convenient development support, and have made many new applications; but their systems still only support UR's own robots, and the overall system price and domestic robots There is no advantage compared to this.

New applications developed using UR robotics
DeX-Platform provides a general-purpose development platform for light industrial robots, including a complete industrial robot bottom layer hardware solution, so that developers who do not understand the robot hardware or the underlying system can get a complete set of industry at a very low cost. The robot controls the system and can focus on developing upper application functions without being troubled by underlying system problems.

DeX-Platform system hardware configuration
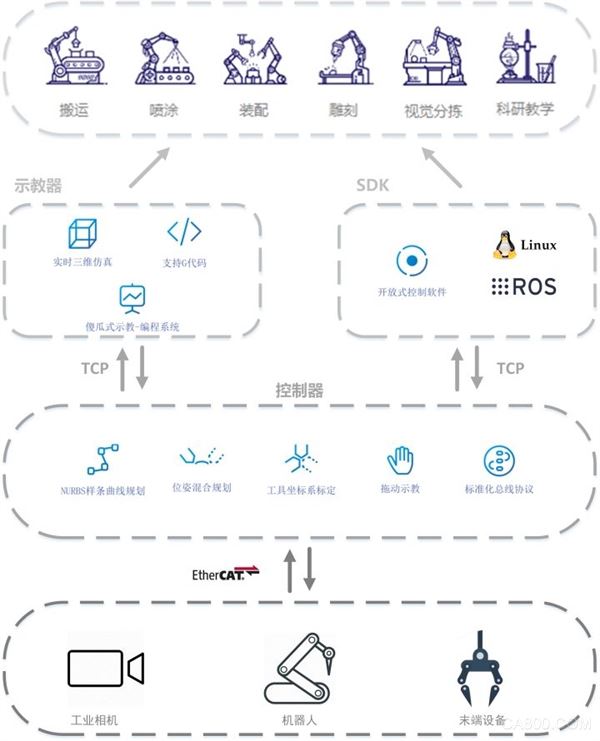
Software System Architecture
In terms of algorithm library, DeX-Platform has built a complete trajectory planning library; it contains standard trajectory types such as joints, straight lines, and arcs, advanced trajectory continuous motion function, and NURBS spline curve type, which can support 3D printing and three-dimensional engraving. Complex process trajectories, advanced interpolation algorithms for continuous motion and high-order smoothing of complex trajectories, support for user coordinate systems, tool coordinate systems, and other coordinate system types; support dynamic algorithm functions, developers can achieve safe collaboration, drag Teaching, force feedback applications and other functions.
Perfect library function avoids a large number of bottom-level repetitive development tasks for users, enabling developers to focus on upper-level applications and significantly increase development efficiency.
Here are two typical application examples based on DeX Platform development.
Intelligent Sorting Application Based on Machine VisionIn the process of transformation and upgrading of traditional manufacturing industries, the role that industrial robots can play in production is constantly expanding. In the past, the application of industrial robots mainly focused on high-intensity, focused on completing repetitive tasks. Now, with the changes in market demand, in order to complete more complex tasks more efficiently, industrial robots are gradually moving closer to keywords such as intelligence and collaboration.
Equipping the equipment with visuals is of great importance for intelligent manufacturing. At present, machine vision technology has a wide range of application scenes in the industrial field, such as product detection, character recognition, motion tracking, item positioning, and the like. Combining machine vision technology with industrial robots helps to meet more flexible application requirements and complete more complex on-site tasks.
For this purpose, DeX-Platform integrates high-performance motion planning algorithms and advanced industrial bus technologies, and provides developers with an SDK under the Linux operating system, which contains a large number of easy-to-use and powerful motion interfaces to help developers. The perfect docking of visual applications and robot platforms in a short period of time.
To meet different visual application development needs, DeX-Platform provides two forms of visual application architecture.
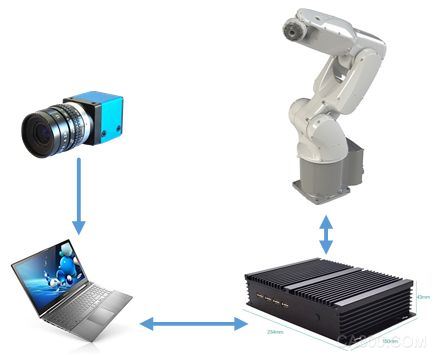
Architecture 1 is a more open organization with PC or server as the core. The visual module and the robot controller can be regarded as devices mounted on a personal computer or a server.
The user can process the acquired image on the personal computer or server, and then according to the result of the processing, call the corresponding movement instruction of the robot to control the robot to complete the task. In this architecture, the visual module and robot can also be used as nodes to access ROS and other open source platforms to help users develop more flexible applications.
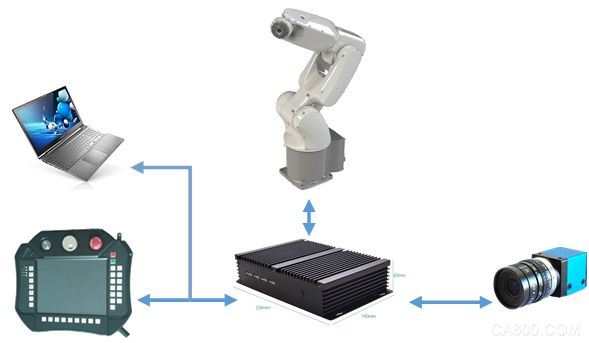
The second architecture is a relatively closed organization with the controller as the core. The controller is connected with the visual module, and the controller can directly obtain the three-dimensional position and orientation information of the target and drive the robot to complete the operations such as grasping.
The user can directly invoke the visual instruction on the teaching pendant to complete the teaching programming, and the visual task can also be accomplished on the personal computer or the server by means of the SDK.
The advantage of this architecture is that it can directly interface with mature machine vision solutions, helping users to complete the deployment in a short time and meeting the task requirements of the field.
The general process of visual application using DeX-Platform can be divided into three steps: coordinate system calibration, target position acquisition, and robot motion planning.
1. Using a calibration algorithm, a transformation matrix of an image coordinate system to a robot base coordinate system is obtained;
Secondly, based on the acquired image, the three-dimensional position and orientation of the target is detected, and it is converted into a representation in the robot base coordinate system. The representation can be a position plus attitude angle, a position plus direction vector, and a homogeneous matrix;
3. Call trajectory planning instructions such as straight line, circular arc, and door movement to drive the robot to move to the corresponding pose. In addition, using the advanced trajectory planning functions such as DeX-Platform's built-in trajectory continuous motion and NURBS spline curve, users can also achieve target tracking, vision-based obstacle avoidance and other applications.
Using DeX-Platform can quickly help developers implement vision-based robotic applications. At the same time DeX-Platform is also constantly enriching the robot's motion mode, improving the speed and performance of the robot movement, and helping you better achieve application requirements.
Robot drag teaching and synchronous replay functionDeX-Platform provides comprehensive robot dynamics support, low-level system based on EtherCAT bus architecture and modular dynamics algorithm library, enabling developers to efficiently integrate advanced features such as safe collaboration and drag teaching for robot bodies. Create a new generation of industrial robot applications.
Take the drag teaching function as an example. The drag-and-drop teaching function is the basic function of robot man-machine collaboration properties and will become the standard of future robot systems.
Based on the zero-force control technology, the drag-and-drop teaching function can be realized without an external torque sensor, which greatly reduces the hardware cost. With the support of the EtherCAT bus architecture, DeX-Platform provides a functional interface for returning motor torque values. In conjunction with robot dynamics related algorithms and development interfaces, developers can provide drag-and-drop teaching functions for various types of industrial robots; The robot's motion path can be reproduced synchronously.

The realization of robot drag teaching function is mainly divided into three steps: robot dynamic modeling, parameter identification and torque control. Here's a brief introduction to these three steps.
The first step is to establish a dynamic model of the robot and use the Newtonian Euler method or Lagrange method to derive the analytical expression of the robot dynamics. The DeX-Platform contains DynamicTau, a function for calculating inverse dynamics, and DynamicGravTau, a function for calculating gravity only. The calculation time is within 100us.
The second step is to identify the kinetic parameters. DeX-Platform uses PDO data feedback of EtherCAT bus communication to obtain the angle, velocity, and moment values ​​of each joint. The unknown parameters can be identified by using the correlation algorithm.
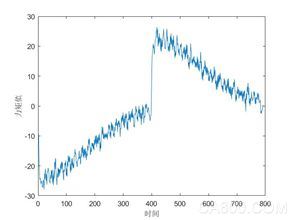
Among them, the joint angle value and speed value are collected by the motor encoder, and the torque value is calculated by the motor current. The DeX-Platform data feedback cycle can be as small as 0.5ms. FIG. 2 is a partial data image of a certain joint torque value during the identification process.
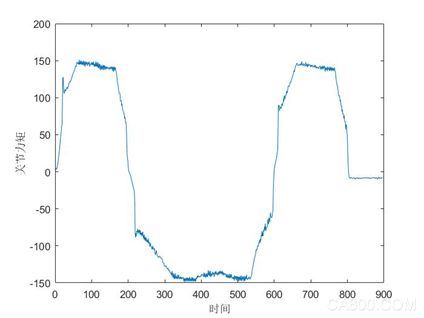
Figure 2 Joint torque acquisition
The third step is torque control. Configure the identified dynamic parameters into DeX-Platform and set the control mode to drag teaching mode.
When the operator drags the robot to move, DeX-Platform collects kinematic data and calculates the torque compensation value in real-time according to the built-in function, which makes the robot drag freely.
Figure 3 shows the torque compensation curve for a certain joint during dragging. During dragging, DeX-Platform provides real-time recording of the joint trajectory for teaching reproduction.
DeX-Platform provides flexible hardware solutions to meet the needs of developers in different situations.
Solution Body Motor and Drive Control System Description 1â—
â—
â—
Provide a complete system with robot body 2-
â—
â—
Provide motor and drive solutions for on-body customers 3-
-
â—
DeX-Platform control system aloneOntology solution: Lightweight six-axis industrial robot with a load of up to 10kg. Motors and Drive Systems: It mainly provides various types of servo motors using the 17-bit absolute value coding of Tamagawa, as well as the Cherytron degenerator.
Control System: The industrial robot control system independently developed by Valkyrie Intelligent Technology Inc. includes DeX-Platform.
Compared with the use of UR robot systems or other common foreign robot systems, the solutions provided by Daktronics have more than 50% price advantage, and can greatly increase development efficiency and shorten the time for developers to verify and deploy products.
Docking more artificial intelligence systems and solutionsValkyrie Smart Technology is working with more robotic upper layer intelligent application solutions companies to help them validate products at the lowest cost and fastest speed, and bring them to market. At the same time, we are also working with robotics ontology manufacturers and more. Many models are targeted for adaptation and development, providing customers with the most cost-effective industrial robot development system.
Valkyrie Intelligent Technology will continue to improve and improve the related functions of DeX-Platform, and continue to provide new functional interfaces. We hope that under a common and open industrial robot development platform, more and more entrepreneurs will enter the field of industrial robots to help them speed up the realization of the intelligent and civilized development of industrial robots and jointly promote the true prosperity of the industry.
Wireless Speaker,Bluetooth Speakers,Bt Wireless Speaker,Portable Bluetooth Speaker
Guangzhou YISON Electron Technology Co., Limited , https://www.yisonearphone.com