Abstract: In order to avoid traffic accidents caused by rear-end collision between two cars in the same lane, this project developed a vehicle distance safety distance intelligent control and self-brake simulation system based on the cause of rear-end collision. The simulation system uses the Hall sensor and the acceleration sensor to measure the rear vehicle speed Vb, and uses the ultrasonic echo ranging principle to measure the vehicle spacing â–³S of the front and rear vehicles. The data is processed by the stm32f103zet6 single-chip microcomputer, and the rear vehicle is automatically adjusted according to the operating conditions of the two vehicles. Driving speed, thus achieving intelligent control of the safe distance between the rear and front vehicles. The actual test shows that the system can realize the intelligent control of the safety distance and meet the design requirements.
Keywords: vehicle safety; simulation; ARM Cortex-M3; intelligent control
In the past few years of road traffic accidents in the country, rear-end accidents accounted for about one-tenth of all traffic accidents. With the development of social economy and the increase of private cars, road traffic congestion has been very serious in recent years. The inability to control vehicle speed in a timely manner and the delay in human response time are the main causes of these problems. To solve these problems, manual driving can be changed to automatic driving, and accurate driving must be accurately measured to achieve automatic driving. The project first improved the speed measurement method, used the acceleration sensor to compensate the error of the traditional Hall sensor speed measurement, realized the accurate measurement of the speed, and then accurately measured the front and rear distance, and realized the intelligent control of the safe distance through the automatic control algorithm.
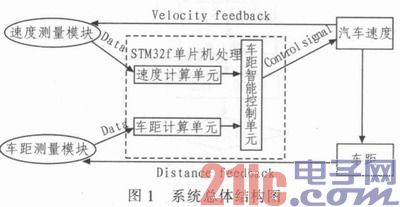
1 system overall design The simulation system structure diagram shown in Figure 1, through the speed measurement module and the distance measurement module to get real-time data, the resulting data is sent to stm32f microcontroller (stm32f microcontroller is a 32-bit based on ARM-CM3 core The microprocessor, the system's main frequency 72 MHz, low power consumption, powerful data processing unit performs calculation and processing, and sends the processing result to the intelligent control unit of the vehicle distance, thereby realizing the vehicle speed control and the intelligent control of the vehicle safety distance.
This article refers to the address: http://
2 Scheme, principle and technical description
2.1 Rear vehicle speed Vb measurement 1) Wheel speed→ Driving speed The constant magnet is mounted on the wheel axle at a certain angular interval. Using the Hall effect, the signal adjustment circuit of the small voltage output is designed and configured to obtain a certain time. Inner (△t) angular separation of the axle rotation (△Ω), according to the wheel radius parameter, get the rear vehicle speed ![]()
2) Linear acceleration → next moment speed The speed is equal to the integral of acceleration versus time. An acceleration sensor made by the principle of piezoelectric effect acquires the linear acceleration a of the trolley and calculates the velocity vn at the next moment. ![]()
2.2 The relative displacement of the two vehicles △ S is measured with the moving rear vehicle as the reference object, and the displacement of the moving front and rear vehicles is the relative displacement ΔS of the two vehicles. The ultrasonic wave is emitted by the ultrasonic transmitting device, and the echo distance measuring principle is used to obtain the relative displacement ΔS of the two vehicles in time according to the time difference ΔT when the receiver receives the ultrasonic wave (wave velocity).
Measurement of relative speed vr of two cars:
Taking the moving rear car as the reference object, the relative speed of the preceding vehicle is measured. The experimental principle is: the ultrasonic wave is transmitted twice in succession at time T, and the relative speed is obtained by obtaining the relative distance twice. According to the relative speed of the vehicle, the motion information of the preceding vehicle is obtained, thereby providing a basis for the adjustment of the rear vehicle speed.
2.3 Safety Distance Intelligent Control Experimental Principle Set the safety distance of the automatic control algorithm according to the vehicle performance. According to vb, â–³s, vr, closed-loop control is adopted, and the rear car speed is automatically adjusted in real time, so that the rear car and the front car maintain a safe distance, and the safe distance control and self-brake are realized. The principle is shown in FIG. 2 .
3 Test data, technical parameters and technical analysis to ensure the accuracy of the ultrasonic ranging system and Hall device speed measurement, is the key to achieve intelligent control of the distance of the system. In the experiment, we measured and analyzed the relevant parameters, recorded and analyzed as follows.
3.1 Experimental data and analysis of ultrasonic ranging module 1) Experimental data of ultrasonic ranging module Experimental method: Firstly, the distance between the ultrasonic distance measuring module and the obstacle in front is accurately determined. This distance is the actual distance. Then start the ultrasonic module and get the test data.
2) Experimental data analysis and conclusion According to the test data and data comparison analysis, the two data curves agree well (as shown in Figure 3). When the distance between the ultrasonic module and the front obstacle is less than 200 cm, the maximum value of the relative error of the test is 3.28%, and increases with the increase of the distance. When the distance between the ultrasonic module and the front obstacle is greater than 200 cm, the relative error increases significantly. .
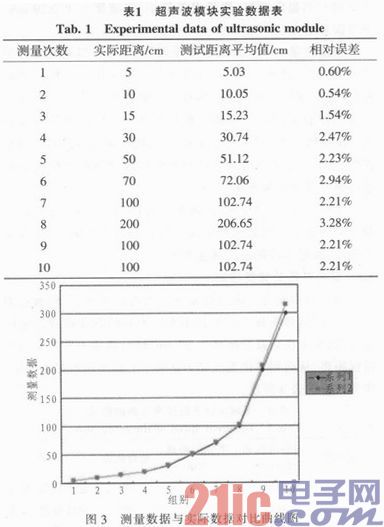
The main cause of the error is that the angle between the mounting position of the module and the obstacle changes with the distance, and the error can be corrected in the algorithm according to the cause.
In this work system, the ultrasonic module is installed in front of the front of the rear car, and the distance between the rear car head and the front car tail (ie, the safety distance between the two cars) is set within 200 cm. From the above data analysis, the distance range test is known. Both the error and the absolute error are small. It can be seen that the ultrasonic ranging module satisfies the design requirements of the system.
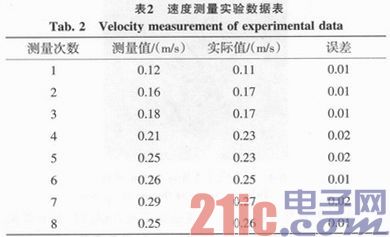
3.2 Experimental data and analysis of velocity measurement 1) Experimental data of velocity measurement Experimental method: This system uses Hall sensor for velocity measurement, and uses acceleration sensor to measure the velocity to improve the accuracy of system velocity measurement. In the experiment, we pass The display data is compared with the measured data to obtain the following data.
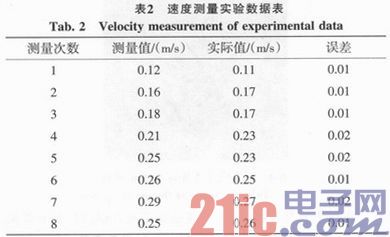
2) Analysis and conclusion of experimental data According to the above data analysis, when the speed of the trolley is 0.12~0.29 m/s, the stability of the speed measurement is good, and the measurement error is small; when the speed is greater than 0.29 m/s, The measurement error increases.
The main reason for the error in the speed measurement is that the model car used in this set of simulation system has a small wheel (5.5 cm in diameter), so that the number of magnetic beads mounted on the wheel in the Hall sensor speed measuring module is too small. (3) The number of signal pulses that can be obtained by one rotation of the wheel is only three, which makes the measurement error larger. There are two error correction methods: method one, using acceleration sensor to reduce the error; method two, using the same principle of photoelectric code wheel speed detector instead of Hall sensor for pulse signal acquisition.
In this work, the running speed of the trolley is 0.12~0.29 m/s. In addition, the acceleration sensor is added to correct the measurement output of the Hall sensor, so that the error is small and meets the speed measurement requirements of the simulation system.
3.3 Intelligent control of safety distance In order to check whether the safety distance maintenance system meets the requirements, we fix a road sign (stop sign position), let the car pass the set reference line at different speeds, the reference line and the road sign distance. It is 50 cm, and then the distance between the trolley and the road sign is measured to determine whether the system is up to standard. The experimental site is shown in Figure 4. The experimental data is shown in Table 3.
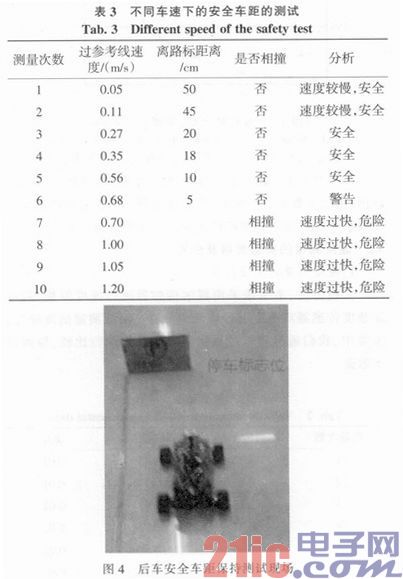
From the above data analysis, the simulation system can realize the intelligent control of the safe distance and the function of the self-brake system when the speed is lower than 0.7 m/s. When the car is overspeed, the maximum safe distance can be adjusted according to the speed of the car to ensure safe driving.
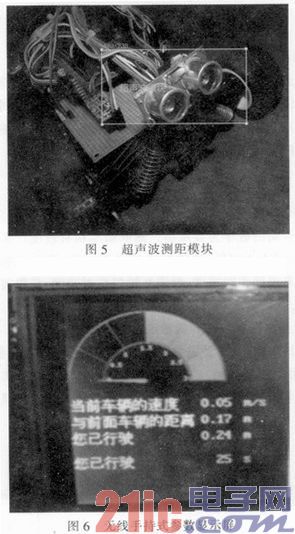
The ranging module of the system and the wireless system operating parameter display module are shown in FIG. 5 and FIG. 6. The user-friendly wireless handheld parameter display provides clear, real-time display of system speed, mileage, and distance to the vehicle.
4 Scientific and advanced nature of the work 1) Velocity measurement At present, most domestic methods for measuring vehicle speed use Hall sensors for speed measurement. However, in actual life, especially on highways, car code tables are often found. The display speed is greater than the actual speed. This error is not caused by the accuracy of the sensor, but by the fact that the wheel is slippery due to poor grip. The speed measurement of the Hall sensor is converted into the speed of the car by measuring the wheel speed of the car. In order to improve this problem, we take measures to measure the acceleration speed of the car line to compensate for the error caused by this measurement method.
2) Safe distance control After setting the safety distance according to the vehicle performance, during the driving, change the front vehicle speed, the rear vehicle can complete the automatic follow-up and adjust the speed, and no rear-end collision occurs with the preceding vehicle. The simulation system can also implement the distance keeping function and the distance warning.
3) Automatic braking system The actual vehicle braking process is a superposition of uniform motion and uniform deceleration motion. As shown in Figure 7, the vehicle speed v(t) is a simple piecewise function: 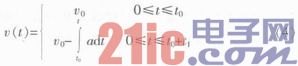
Where v0 is the vehicle speed before the braking measures are taken and a is the average braking deceleration.
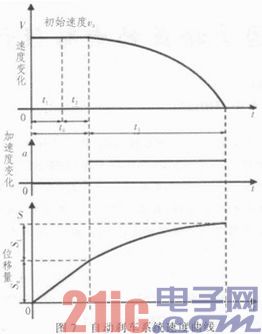
For the speed v (t) integral, the braking distance can be obtained: ![]()
When it is detected that there is a static obstacle in front, the car can activate the automatic braking function, emergency braking to prevent collision, and the intelligent driving mode reduces the driver's fatigue.
5 Conclusion Vehicle safety distance intelligent control and self-brake simulation system through the speed of the accurate test and automatic control algorithm, the realization of the automatic driving and automatic braking function of the front and rear safety distance of the vehicle in the same lane driving. In practical applications, the occurrence of rear-end collisions can be prevented in real time, the safety of vehicles can be improved, and the driver's psychological burden can be reduced. At the same time, the project results can also be applied to car unmanned driving, providing ideas for automatic driverless driving of automobiles. And technical support, and the system can also be improved to the automatic following system, to solve the delay of manual operation, so as to achieve real-time, sensitive and improved traffic control.
I Get Disposable ecig have a completely enclosed design, reducing the need for charging and replacing cartridges. The no-charge design also reduces the occurrence of faults. It is understood that with rechargeable e-cigarettes, each cartridge needs to be charged at least once and the battery efficiency is extremely low, while the design of disposable ecig can solve this problem very well.
I Get Disposable E-Cigarette,I Get Mini E Cigarette,I Get Electronic Cigarette Customizing,Rechargeable E Cigarette
Shenzhen E-wisdom Network Technology Co., Ltd. , https://www.globale-wisdom.com